
نصائح عملية للتركيب والتشغيل للصمامات والمُدارات والحساسات والمُتحكِّمات والمزيد.
الصمامات
الصمامات
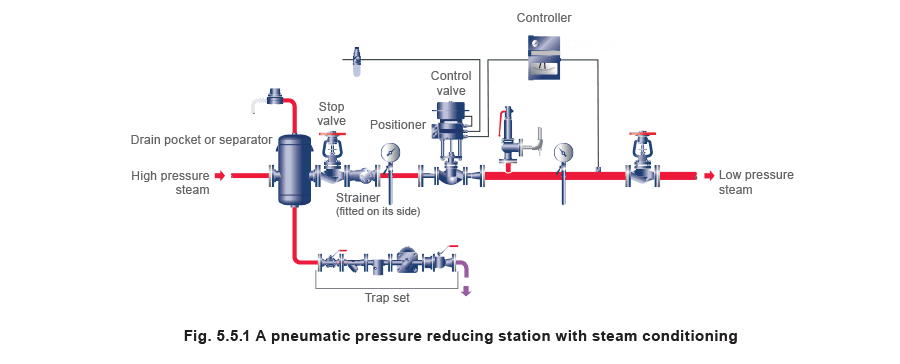
قبل تركيب صمام تحكم من الضروري التأكد من أن الحجم والتصنيف الضغطي والمواد ووصلات الأطراف جميعها مناسبة للظروف التي يُتوقع أن يعمل الصمام فيها. سيوفر جميع المصنعين ذوي السمعة لمعدات التحكم الآلي تعليمات مفصلة تغطي إجراءات التركيب الصحيح لمعداتهم. ستُقدَّم أيضاً بيانات حول كيفية إعداد المعدات، بالإضافة إلى أي صيانة دورية ومنتظمة يجب إجراؤها. في معظم الحالات، سيقدم المُصنِّع أيضاً خدمة تشغيل في الموقع. في بعض الحالات، يمكن الاتفاق على عقد صيانة دورية بعد البيع. تغطي الوحدة 5.5 النقاط الرئيسية التي يجب مراعاتها قبل التركيب. يجب أن تكون الأنابيب صاعدة ونازلة من صمام التحكم واضحة وخالية من العوائق. سيتأثر التشغيل الصحيح للصمام إذا كان معرضاً لإجهادات تشويه خط الأنابيب. من المهم التأكد من أن جميع الوصلات المفلنجة مربعة ومستقيمة وأن الأنابيب مدعومة بشكل كافٍ. يجب عموماً تركيب صمامات التحكم في خطوط أنابيب أفقية مع أعمدة رأسية. تتعرض أنظمة الأنابيب غالباً لاختبارات الضغط قبل الاستخدام. قد يُجرى هذا الاختبار عند ضغط أعلى من ظروف العمل العادية. من الضروري التأكد من أن صمام التحكم ومكوناته الداخلية مصممة لتحمل هذا الضغط الأعلى للاختبار. صمامات التحكم هي في جوهرها أدوات وتتضرر إذا سُمح للشوائب أو المواد الكاشطة أو المعوقة الأخرى بالدخول إليها. من الضروري في معظم التطبيقات منع ذلك بتركيب مصافٍ في خط الأنابيب صاعداً من أي صمام تحكم. يجب أيضاً أن تكون الصمامات قابلة للوصول لصيانة الروتين، مثل إعادة حشو الغدد واستبدال المكونات الداخلية. لتسهيل هذا النوع من العمل، ستبقي صمامات العزل ذات النمط الكامل للبئر على جانبي الصمام وقت توقف المنشأة عند أدنى حد أثناء إجراء العمل. إذا كان يجب الحفاظ على تشغيل المنشأة في جميع الأوقات، حتى عند فحص صمام التحكم أو صيانته، فقد يكون من الضروري تركيب مسار تحويل بصمام. ومع ذلك، يجب أن يكون الصمام المستخدم في مسار التحويل ذا جودة جيدة ويجب أن يكون إما صمام خنق مُوصَّف أو صمام تحكم آخر بـ Kvs صحيح. أي تسرّب عبره خلال التشغيل العادي سيؤثر على عمل نظام التحكم. لا يُوصى بتركيب مسارات تحويل يدوية تحت أي ظرف. يجب تركيب صمام التحكم لضمان اتجاه التدفق الصحيح للوسط المار عبر الصمام. عادةً يُنقَش سهم ‘اتجاه التدفق’ في جسم صمام التحكم. يجب أن يمتلك الصمام سعة تدفق مناسبة ويسبب انخفاض ضغط مقبولاً. في خطوط البخار، من المهم توفير فاصل بخار و/أو نقطة تصريف صاعداً من الصمام، كما هو موضح في الشكل 5.5.1. سيمنع ذلك حمل المكثف عبر صمام التحكم، والذي سيخفض خلاف ذلك عمره الافتراضي. نقطة التصريف هذه مهمة أيضاً إذا كان من المحتمل أن يبقى صمام التحكم مغلقاً لفترة طويلة. إذا لم يُركَّب مصريف مكثف، فقد تحدث مطرقة ماء وتلف خطير محتمل عندما يفتح الصمام. يضمن توفير فاصل بخار ومصفي conditioning بخار جيد.
المُدارات/الحساسات
المُدارات/الحساسات
مرة أخرى، يجب اتباع تعليمات المُصنِّم. تُثبَّت المُدارات عمودياً عادة فوق صمام التحكم، على الرغم من أن ترتيبات مختلفة قد يُوصى بها إذا كان مُدار كهربائي مُثبَّتاً على صمام يتعامل مع وسط درجة حرارة عالية، مثل البخار. عموماً، يجب وضع المُدارات بعيداً عن ظروف مثل الحرارة الزائدة أو الرطوبة العالية أو الأبخرة المُآكِلة. من المحتمل أن تسبب فشل مبكر في مكونات مثل الأغشية أو الأجهزة الكهربائية/الإلكترونية. يجب أن يحدد المُصنِّم ظروف درجة الحرارة المحيطة القصوى الموصى بها لمعداته. مع بعض المُدارات الكهربائية، إذا كان من المحتمل حدوث تكثيف داخل المُدار، تتوفر نماذج بسخان مدمج. حيث لا يمكن تجنب هذه الظروف، يجب شراء مُدارات مناسبة لظروف التركيب. الأغلفة للمُدارات ومحددات المواقع وما إلى ذلك، ستحمل عادةً تصنيف غلاف يتوافق مع قانون كهربائي وطني. يجب أن يحدد هذا درجة مناعة الصندوق ضد دخول الغبار والماء. لا قيمة لاستخدام مُدار كهربائي بغلاف منخفض التصنيف ضد دخول الماء إذا كان من المحتمل أن يُغسل بالخراطيم! يجب توخي الحرص لضمان أن تكون الحساسات مغمورة بالكامل وبشكل صحيح إذا كان من المفترض أن تؤدي وظيفة الاستشعار بفعالية. استخدام الجيوب سيمكن من الفحص أو الاستبدال دون الحاجة إلى تصريف نظام الأنابيب أو الوعاء أو المنشأة العملية. في المقابل، ستؤخر الجيوب أوقات الاستجابة. سيُقلل استخدام معجون ناقل للحرارة في الجيب من أي تأخير في الاستجابة.
خطوط الطاقة والإشارة
خطوط الطاقة والإشارة
مع نظام هوائي، يجب أن تكون خطوط الهواء المضغوط والإشارة الهوائية جافة وخالية من الزيت والشوائب ومحكمة الإغلاق. وضع المُتحكِّم الهوائي بالقرب من الصمام والمُدار سيُقلل من أي تأخير due to سعة ومقاومة خط الإشارة. عادةً، سيُقدَّم الصمام والمُدار وأي محددات موقع أو محوّلات بوصفها وحدة كاملة مُجمَّعة مسبقاً. إذا لم تكن كذلك، فسيحتاج المُدار إلى التثبيت على الصمام، ومحدد الموقع (لتحكم هوائي) على المُدار. ثم يجب إعداد التجميع بشكل صحيح، لضمان تحقيق سير الصمام الصحيح، إلخ، وفقاً لتعليمات المُصنِّم.
التوصيلات الكهربائية للضوابط الكهربائية/الإلكترونية والكهربائية الهوائية
في كثير من الأحيان، تتبعع many مشكلات ‘التحكم’ الواضحة إلى توصيلات خاطئة. لاقتباس مشكلة واضحة واجهتها كمثال متطرف، توصيل مصدر 110 فولت بمحرك مُصنَّف 24 فولت سيؤدي إلى تلف! يجب توخي الحرص مع نظام التوصيلات، وفقاً لتعليمات المُصنِّم، وتخضع لأي لوائح محلية. ‘الضوضاء’ أو التداخل الكهربائي في الأنظمة الكهربائية كثيراً ما يُواجَز، مما يؤدي إلى مشكلات تشغيلية يصعب تشخيصها. قد يكون استخدام كابل مُحصَّن أو قنوات مُوصَّلة بالأرض بشكل منفصل أو مُتحكِّم ذاتي أو تناظري ضرورياً. يجب حماية الكابلات من التلف الميكانيكي.
المُتحكِّمات
المُتحكِّمات
كما ذُكر سابقاً، سينتج التطبيق عموماً تغيرات أبطأ من وقت استجابة نظام التحكم. لهذا يجب ضبط معلمات المُتحكِّم، النطاق التناسبي أو الكسب، والوقت التكاملي والوقت التفاضلي، لتناسب كل تطبيق/مهمة محددة. هناك عدد من طرق ضبط معلمات المُتحكِّم، معظمها يتضمن استخدام الرياضيات. يمكن التنبؤ بسلوك حلقة التحكم رياضياً لكن خصائص العملية أو التطبيق عادة تُحدَّد بقياس تجريبي، مما قد يكون صعباً. يمكن العثور على طرق مبنية على نسب نقل حرارة التصميم، لكنها خارج نطاق هذه الوحدة. قبل إعداد معلمات التحكم، من المفيد مراجعة كل مصطلح تحكم (P، I و D)، والخيارات الثلاث regarding الإعدادات، مثلاً، أوسع مما ينبغي، أضيق مما ينبغي، وصحيح.
النطاق التناسبي (الشكل 5.5.2)
النطاق التناسبي (الشكل 5.5.2)
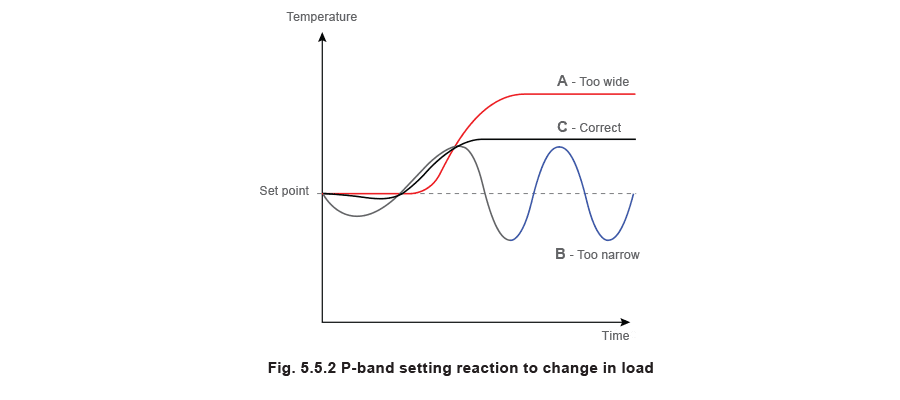
إذا كان النطاق التناسبي أوسع مما ينبغي، يحدث انحراف كبير لكن النظام مستقر جداً (المنحنى A). تقليل النطاق التناسبي سيخفض الانحراف. نطاق تناسبي أضيق مما ينبغي سيسبب عدم استقرار وذبذبات (المنحنى B). يتحقق النطاق التناسبي الأمثل، المنحنى C، عند إعداد أعرض قليلاً من ذلك الذي يسبب ذبذبات دائمة.
ملخص النطاق التناسبي (الإجراء التناسبي)
نطاق تناسبي صحيح = استقرار جيد، استجابة جيدة بعض الانحراف
نطاق تناسبي أوسع = استقرار أفضل، استجابة أبطأ انحراف أكبر
نطاق تناسبي أضيق = عدم استقرار، استجابة أسرع انحراف أقل مع ذبذبات
الإجراء التكاملي (الشكل 5.5.3)
الإجراء التكاملي (الشكل 5.5.3)
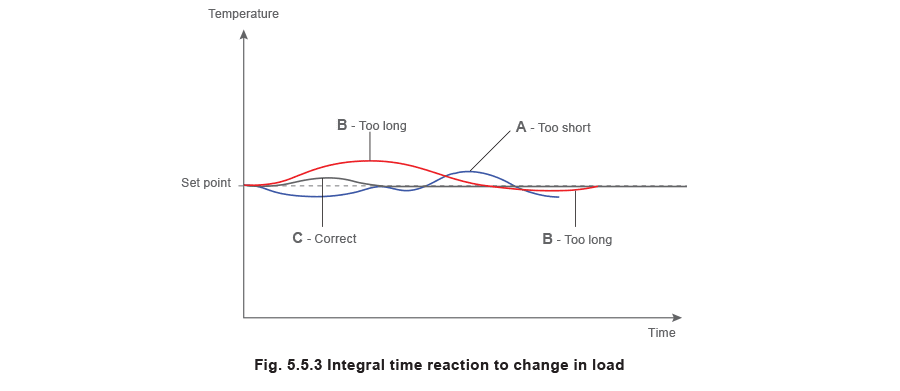
مع وقت تكاملي قصير جداً، ستعبر درجة الحرارة (المنحنى A) نقطة الضبط وسيحدث بعض الذبذبات. وقت تكاملي مفرط سيؤدي إلى أن يستغرق عودة درجة الحرارة إلى نقطة الضبط وقتاً طويلاً جداً (المنحنى B). يبين المنحنى C إعداد وقت تكاملي صحيح حيث تعود درجة الحرارة إلى نقطة الضبط بأسرع وقت ممكن دون أي تجاوز أو ذبذبات.
| ملخص الإجراء التكاملي | ||
| وقت تكاملي صحيح = | استبعاد الانحراف | مستقر - لا تجاوز |
| وقت تكاملي قصير جداً = | استبعاد الانحراف | استجابة سريعة جداً، تسبب عدم استقرار وتجاوز |
| وقت تكاملي طويل جداً = | استبعاد الانحراف | استجابة بطيئة، مستقرة، لا تجاوز |
الإجراء التفاضلي (الشكل 5.5.4)
الإجراء التفاضلي (الشكل 5.5.4)
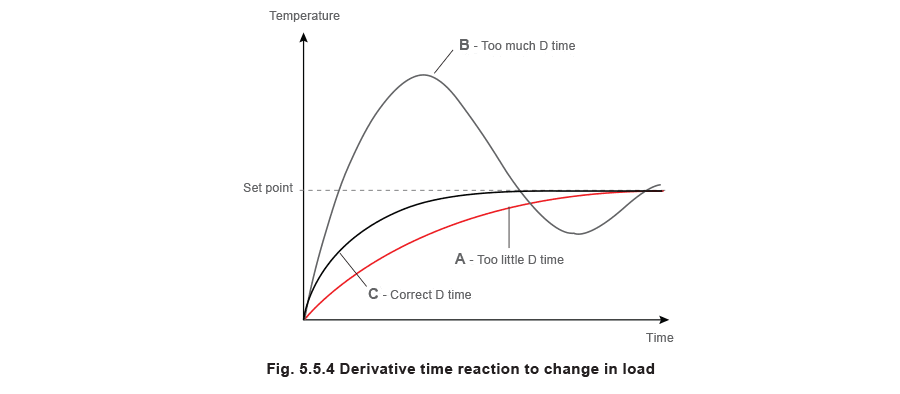
وقت تفاضلي مفرط سيسبب تغيراً سريعاً جداً في درجة الحرارة، وتجاوزاً وذبذبات (المنحنى B). وقت تفاضلي قصير جداً يسمح لدرجة الحرارة بالانحراف عن نقطة الضبط لوقت طويل (المنحنى A). يعيد الإعداد الأمثل درجة الحرارة إلى نقطة الضبط بأسرع وقت ممكن ويتسق مع استقرار جيد (المنحنى C).
| ملخص الإجراء التفاضلي | |
| وقت تفاضلي صحيح = | استجابة سريعة، مستقرة |
| وقت D كثير جداً = | استجابة أسرع تؤدي إلى تجاوز وعدم استقرار |
| وقت D قليل جداً = | استجابة أبطأ |
طرق عملية لإعداد مُتحكِّم
طرق عملية لإعداد مُتحكِّم
يجب إعداد كل مُتحكِّم بشكل فردي لمطابقة خصائص نظام معين. على الرغم من وجود عدد من التقنيات المختلفة التي يمكن من خلالها تحقيق تحكم مستقر وسريع، إلا أن طريقة زيغلر-نيكولز أثبتت فعاليتها.
طريقة زيغلر-نيكولز
طريقة زيغلر-نيكولز
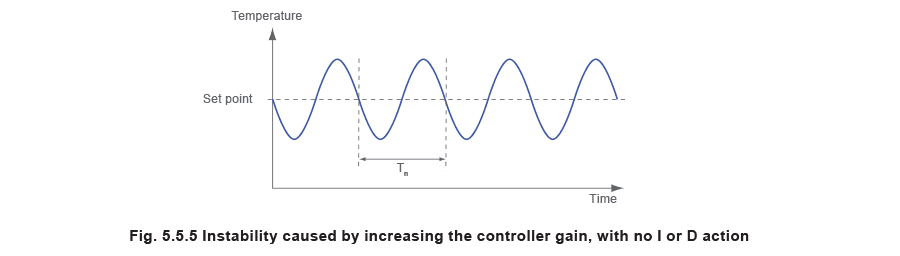
طريقة استجابة التردد لزيغلر-نيكولز (تُسمى أحياناً طريقة الذبذبات الحرجة) فعالة جداً في تحديد إعدادات المُتحكِّم للحمل الفعلي. تستخدم الطريقة المُتحكِّم بوصفه مُضخِّماً للوصول إلى نقطة عدم الاستقرار. عند هذه النقطة يعمل النظام كاملاً بحيث تتذبذب درجة الحرارة حول نقطة الضبط بسعة ثابتة (انظر الشكل 5.5.5). زيادة صغيرة في الكسب، أو نطاق تناسبي مُقلَّل، ستجعل النظام غير مستقر، وسيبدأ صمام التحكم في البحث مع سعة متزايدة. في المقابل، نطاق تناسبي مُزداد سيجعل العملية أكثر استقراراً وستُقلَّل السعة تدريجياً. عند نقطة عدم الاستقرار، تُكتَسب خصائص النظام للظروف التشغيلية الفعلية، بما في ذلك المبادل الحراري وصمام التحكم والمُدار والأنابيب وحساس درجة الحرارة. يمكن تحديد إعدادات المُتحكِّم عبر طريقة زيغلر-نيكولز بقراءة الفترة الزمنية (Tn)، لدورات درجة الحرارة؛ وإعداد النطاق التناسبي الفعلي عند نقطة عدم الاستقرار.
إجراء اختيار إعدادات معلمات PID باستخدام طريقة زيغلر-نيكولز هو كالتالي:
- إزالة الإجراء التكاملي على المُتحكِّم بزيادة الوقت التكاملي (Ti) إلى أقصاه.
- إزالة الإجراء التفاضلي للمُتحكِّم بتعيين وقت الاشتقاق (TD) إلى 0.
- الانتظار حتى تصل العملية إلى حالة مستقرة.
- تقليل النطاق التناسبي (زيادة الكسب) حتى تصل إلى نقطة عدم الاستقرار.
- قياس الوقت لفترة واحدة (Tn) وتسجيل إعداد النطاق التناسبي الفعلي (P-band) على المُتحكِّم عند هذه النقطة.
- باستخدام هذا الإعداد بوصفه نقطة البداية، حساب إعدادات المُتحكِّم المناسبة وفقاً للقيم في الشكل 5.5.6.
الشكل 5.5.6 حساب زيغلر-نيكولز
الشكل 5.5.6 حساب زيغلر-نيكولز
| نطاق تناسبي | وقت تكاملي | وقت تفاضلي | |
|---|---|---|---|
| تحكم P I D | نطاق P × 1.7 | Tn/2 | Tn/8 |
| تحكم P I | نطاق P × 2.2 | Tn/1.2 | |
| تحكم P | نطاق P × 2.0 |
قد تُعدَّل إعدادات المُتحكِّم بشكل إضافي لزيادة الاستقرار أو الاستجابة. يُوضِّح الشكل 5.5.7 تأثير تغيير إعدادات معلمات PID على الاستقرار واستجابة التحكم.
الشكل 5.5.7 تأثير تغيير إعدادات PID
الشكل 5.5.7 تأثير تغيير إعدادات PID
| الاستقرار | الاستجابة | |
| زيادة نطاق P | يزداد | أبطأ |
| زيادة Ti | يزداد | أبطأ |
| زيادة TD | ينخفض | أسرع |
النقل بدون ارتعاش
النقل بدون ارتعاش
تتضمن المواصفات الفنية للمُتحكِّمات مصطلحات كثيرة أخرى وأحد المصطلحات الشائعة هو ‘النقل بدون ارتعاش’. معظم المُتحكِّمات تتضمن مفتاح ‘يدوي’ - ‘آلي’ وقد تكون هناك أوقات تتطلب فيها حالات تحكم معينة تحكماً يدوياً. هذا يجعل مقاطعة حلقة التحكم الآلي ضرورية. بدون النقل بدون ارتعاش، سيكون النقل من الوضع الآلي إلى اليدوي والعكس يعني فقدان مستويات التحكم، ما لم يُطابَق المخرج اليدوي مع المخرج الآلي. يضمن النقل بدون ارتعاش تطابق المخرجات - سواء من اليدوي إلى الآلي أو من الآلي إلى اليدوي - ويكون من الضروري فقط تحريك المفتاح حسب الحاجة.
مُتحكِّمات ذاتية الضبط
مُتحكِّمات ذاتية الضبط
توفّر المعالجات الدقيقة الحديثة القدرة على بعض الوظائف التي كانت تتطلب حاسوباً سابقاً، لتُحزم في المساحة المحدودة لمُتحكِّم. من بين هذه، كانت القدرة على ‘الذاتية الضبط’. مُتحكِّمات لم تعد تتطلب مهندس تشغيل لإعداد مصطلحات P I D متوفرة منذ سنوات عديدة. يُبدِّل المُتحكِّم ذاتي الضبط إلى تحكم تشغيل/إيقاف لفترة زمنية معينة. خلال هذه الفترة يحلل نتائج استجاباته، ويحسب ويُعيِّن مصطلحات P I D الخاصة به. كان الوضع سابقاً أن وظيفة الذاتية الضبط لا يمكنها إلا تطبيق نفسها أثناء بدء تشغيل النظام؛ بمجرد تعيينها بواسطة المُتحكِّم، تبقى مصطلحات P I D ثابتة، بصرف النظر عن أي تغيرات لاحقة في العملية. يمكن للمُتحكِّم الحديث الآن تشغيل ما يُسمى بوظيفة التكيف، التي لا تُعيِّن فقط مصطلحات P I D الأولية المطلوبة، بل تراقب وتُعيد تعيين هذه المصطلحات إذا لزم الأمر، وفقاً للتغيرات في العملية خلال ظروف التشغيل العادية. هذه المُتحكِّمات متوفرة بسهولة ونسبياً غير مكلفة. يزداد استخدامها بشكل متزايد، حتى لمهام التحكم غير المتطورة نسبياً.