
مُنشِّئات وموصّلات صمامات التحكم
تحتاج صمامات التحكم إلى مُنشِّئات للتشغيل. تناقش هذه الوحدة التعليمية بإيجاز الفروقات بين المُنشِّئات الكهربائية والهوائية، والعلاقة بين مصطلحات العمل المباشر والعكسي، وكيف يؤثر ذلك على تأثير تحكم الصمام. تُناقَش أهمية الموصّلات فيما يتعلق بما تفعله ولماذا تكون مطلوبة للعديد من التطبيقات.
المُنشِّئات من المهم الإشارة في البداية إلى أن ليس جميع تطبيقات التحكم تحتاج إلى مُنشِّئ متطور.
على سبيل المثال، يمكن تشغيل صمام و مُنشِّئ التشغيل/الإيقاف مباشرة من منظم حرارة. مثال آخر هو تشغيل أدوات التأمان حد عالية، التي لها “تأثير مفاجئ” لإغلاق الصمامات أو إيقاف إمدادات الوقود.
ومع ذلك، عندما تصبح متطلبات التحكم أكثر تعقيدًا، يُحتاج إلى مُنشِّئ لمطابقة هذه المتطلبات.
يُستقبل المُنشِّئ إشارة، ويقرر الإجراء المطلوب ثم يُرسل إشارة إلى المُنشِّئ لتحريكه.
في عصر الشرائح الدقيقة والدوائر المتكاملة والحواسيب، يمكن أن تكون الوظائف التي يؤديها المُنشِّئ معقدة للغاية.
ومع ذلك، نظرًا لإجراء تشبيه بين الدماغ البشري والمُنشِّئات/الحواسيب في وحدات سابقة، يمكن إعادة صياغة شعار IBM الشهير:
الحاسب - سريع ودقيق وأغبي
الإنسان - بطيء وفوضوي وعبقري
للخلاصة، لن يحل المُنشِّئ جميع المشاكل. يجب اختياره وتشغيله الأولي بشكل صحيح، وهما موضوعان سيُعالَجان لاحقًا.
على الرغم من أن معظم المُنشِّئات حاليًا إلكترونية رقمية/ميكروبروسيسور، إلا أن مجموعة من المُنشِّئات الهوائية متوفرة تجاريًا. قد تُستخدم في المناطق الخطرة حيث يمنع خطر الانفجار استخدام الأجهزة الكهربائية/الإلكترونية. من الممكن جعل الأجهزة الكهربائية “آمنة جوهريًا” أو مقاومة للانفصال أو محكمة ضد اللهب، ومع ذلك، هناك عادةً تكلفة كبيرة.
كما ذُكر سابقًا، يمكن أن تكون الوظائف التي يؤديها المُنشِّئ معقدة جدًا وهو خارج نطاق هذه المنشورة سردها بالتفصيل أو شرح كيفية عملها.
التغييرات الرئيسية التي تتطلب دراسة هي كما يلي:
مُنشِّئ حلقة واحدة
يشغّل صمامًا/مُنشِّئًا واحدًا من مستشعر واحد.
مُنشِّئ متعدد الحلقات
قد يشغّل أكثر من صمام/مُنشِّئ من أكثر من مستشعر.
إدخال/إخراج واحد
يقبل إشارة واحدة فقط من المستشعر ويُرسل واحدة فقط إلى المُنشِّئ.
إدخال/إخراج متعدد (متعدد القنوات)
يقبل عدة إشارات ويُرسل عدة إشارات.
الوقت الحقيقي
قد يشمل ساعة زمنية للتبديل في أوقات مُحددة مسبقًا مُعيَّنة.
الوقت المنقضي
قد يُبدّل في بعض الأوقات المُحددة مسبقًا المُعيَّنة قبل أو بعد تشغيل أو إيقاف أجهزة أخرى من المنشآت.
الصعود والبقاء
باستخدام درجة الحرارة كمثال، القدرة على رفع درجة حرارة وسيط مُتحكَّم فيه خلال فترة زمنية محددة ثم الحفاظ عليها عند قيمة مُعيَّنة. غالبًا ما تتضمن مثل هذه المُنشِّئات سلسلة من الصعودات والبقاءات.
يُظهر الشكل 6.7.1 مُنشِّئ حلقة واحدة إلكتروني نموذجي. لديه إجراء P + I + D (مُناقَش في الوحدات 5.2 و 5.4)، مناسب لإمداد 110 أو 230 فولت.
يُظهر الشكل 6.7.2 مُنشِّئ حلقة واحدة هوائي بإجراء P.
يمكن اختيار طرازات مختلفة للتحكم إما في درجة الحرارة أو الضغط.
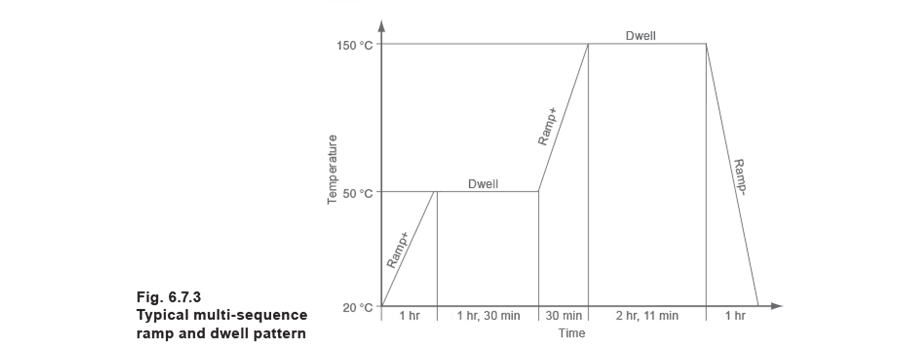
مُنشِّئ حلقة واحدة، لديه القدرة على أداء وظائف الصعود والبقاء، قد يكون لديه نمط تسلسل نموذجي مثل الموضح في الشكل 6.7.3. هذا يُظهر سلسلة من وظائف الصعود (تغير درجة الحرارة) والبقاء (الحفاظ على درجة الحرارة)، تُنفَّذ خلال فترة زمنية
مصطلح شائع في أدبيات التحكم هو “مُنشِّئ المنطق القابل للبرمجة (PLC)”. في العملية الدفعية، يجب أن يُشغّل المُنشِّئ تسلسل من الإجراءات، على سبيل المثال، تشغيل وإيقاف الصمامات أو المضخات. في بعض الحالات يكون التسلسل بالكامل على أساس زمني، ولكن غالبًا ما تُشغَّل الخطوات المختلفة بتحقيق شرط معين والحفاظ عليه لفترة زمنية محددة؛ على سبيل المثال الوصول إلى درجة حرارة معينة أو ملء وعاء. يمكن التحكم في هذه التسلسلات بواسطة PLC، جهاز قائم على حاسب مصغر يستخدم واجهات قياسية لأجهزة الاستشعار والمُنشِّئات للتحكم في العملية. نوع آخر من المُنشِّئات المعقدة هو مُنشِّئ غرفة المنشآت، الذي قد يُستخدم للتحكم في الغلاية والمضخة وصمام تحكم التدفئة وصمام المياه الساخنة، فضلاً عن توفير عدد من الميزات الأخرى. أجهزة الاستشعار في هذا القسم سيُغطى موضوع قياس درجة الحرارة بشكل أوسع. هناك مجموعة متنوعة من أجهزة الاستشعار والمحوّلات المتاحة لقياس الضغط والمستوى والرطوبة والخصائص الفيزيائية الأخرى. جهاز الاستشعار هو جزء من نظام التحكم، الذي يختبر التغير في المتغير المُتحكَّم فيه. قد يكون جهاز الاستشعار من النوع الذي يُسبب تغير درجة الحرارة تغيرًا في الجهد الكهربائي أو ربما تغيرًا في المقاومة.
قد تكون إشارة المستشعر صغيرة جدًا، مما يتطلب معالجة إشارة محلية ومضخخًا لقراءتها بشكل فعال. قد يتحول تغير صغير في المقاومة الذي يُشير إليه المستشعر استجابةً لتغير درجة الحرارة، على سبيل المثال، إلى جهد كهربائي أو تيار للإرسال إلى المُنشِّئ.
نظام الإرسال نفسه هو مصدر محتمل للأخطاء.
تُسبّب الأسلاك مقاومة كهربائية (تُقاس بالأوم)، فضلاً عن خضوعها للتداخل الكهربائي (الضوضاء). في نظام هوائي قابل للمقارنة، قد تكون هناك أيضًا تسريبات دقيقة في نظام الأنابيب.
يُستخدم مصطلح “منظم حرارة” عمومًا لوصف جهاز استشعار حرارة مع مفتاح تشغيل/إيقاف.
“المحوّل” هو مصطلح شائع آخر، ويُشير إلى جهاز يُحوّل خاصية فيزيائية إلى أخرى؛ على سبيل المثال، درجة الحرارة إلى جهد كهربائي (ميلي فولت).
مثال على المحوّل هو جهاز يُحوّل تغير درجة الحرارة إلى تغير في المقاومة الكهربائية.
مع الأجهزة الهوائية، يُصادف كثيرًا كلمة “مُرسِل”. هو ببساطة وصف آخر لمحوّل أو جهاز استشعار، ولكن عادةً مع بعض المعالجة الإضافية للإشارة.
ومع ذلك، يُسمى جهاز القياس الفعلي عادةً بجهاز الاستشعار، وسيتم توضيح الأنواع الأكثر شيوعًا في القسم التالي.
أجهزة استشعار الأنظمة المملوءة
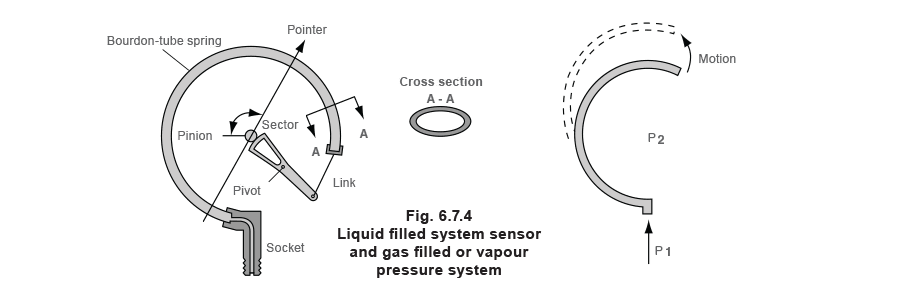
مع المُنشِّئات الهوائية، تُستخدم أجهزة استشعار الأنظمة المملوءة. يوضح الشكل 6.7.4 مبادئ مثل هذا النظام.
مصطلح شائع في أدبيات التحكم هو “مُنشِّئ المنطق القابل للبرمجة (PLC)”. في العملية الدفعية، يجب أن يُشغّل المُنشِّئ تسلسل من الإجراءات، على سبيل المثال، تشغيل وإيقاف الصمامات أو المضخات. في بعض الحالات يكون التسلسل بالكامل على أساس زمني، ولكن غالبًا ما تُشغَّل الخطوات المختلفة بتحقيق شرط معين والحفاظ عليه لفترة زمنية محددة؛ على سبيل المثال الوصول إلى درجة حرارة معينة أو ملء وعاء. يمكن التحكم في هذه التسلسلات بواسطة PLC، جهاز قائم على حاسب مصغر يستخدم واجهات قياسية لأجهزة الاستشعار والمُنشِّئات للتحكم في العملية.
نوع آخر من المُنشِّئات المعقدة هو مُنشِّئ غرفة المنشآت، الذي قد يُستخدم للتحكم في الغلاية والمضخة وصمام تحكم التدفئة وصمام المياه الساخنة، فضلاً عن توفير عدد من الميزات الأخرى.
عندما تتغير درجة الحرارة، يتمدد السائل أو ينكمش، مما يُسبب أنبوب بوردون أن يميل إلى الاستقامة. أحيانًا يُستخدم بيلوز بدلاً من أنبوب بوردون.
في الماضي، كان الحشو غالبًا زئبقيًا. عند التسخين، يتمدد، مما يُسبب لف أنبوب بوردون؛ التبريد يُسبب الانكماش ويُجبر أنبوب بوردون على اللف بإحكام أكبر. تُستخدم حركة اللف هذه لتشغيل الروافع داخل المُنشِّئ الهوائي تمكينه من أداء مهمته. إصدار استشعار الضغط ببساطة يستخدم أنبوب ضغط موصول بأنبوب بوردون. ملاحظة: لأسباب تتعلق بالصحة والسلامة، يُستخدم الزئبق الآن بشكل أقل. بدلاً من ذلك، غالبًا ما يُستخدم غاز خامل مثل النيتروجين.
أجهزة استشعار درجة حرارة المقاومة (RTDs)
تستخدم RTDs (الشكل 6.7.5) حقيقة أن المقاومة الكهربائية لبعض المعادن تتغير مع تغير درجة الحرارة. تعمل كمحوّلات كهربائية، تُحوّل تغيرات درجة الحرارة إلى تغيرات في المقاومة الكهربائية. البلاتين والنحاس والنيكل هي ثلاثة معادل تلبي متطلبات RTD ويُظهر الشكل 6.7.6 العلاقة بين المقاومة ودرجة الحرارة.
يُحدَّد جهاز استشعار درجة حرارة المقاومة من حيث مقاومته عند 0 درجة مئوية والتغير في المقاومة من 0 إلى 100 درجة مئوية. أكثر RTD استخدامًا للتطبيقات النموذجية المغطاة في هذه الوحدات هي RTDs البلاتينية. تُبنى بمقاومة 100 أوم عند 0 درجة مئوية ويُشار إليها غالبًا بأجهزة استشعار Pt100. يمكن استخدامها على مدى درجات حرارة من -200 إلى +800 درجة مئوية بدقة عالية (±0.5%) بين 0 و 100 درجة مئوية.
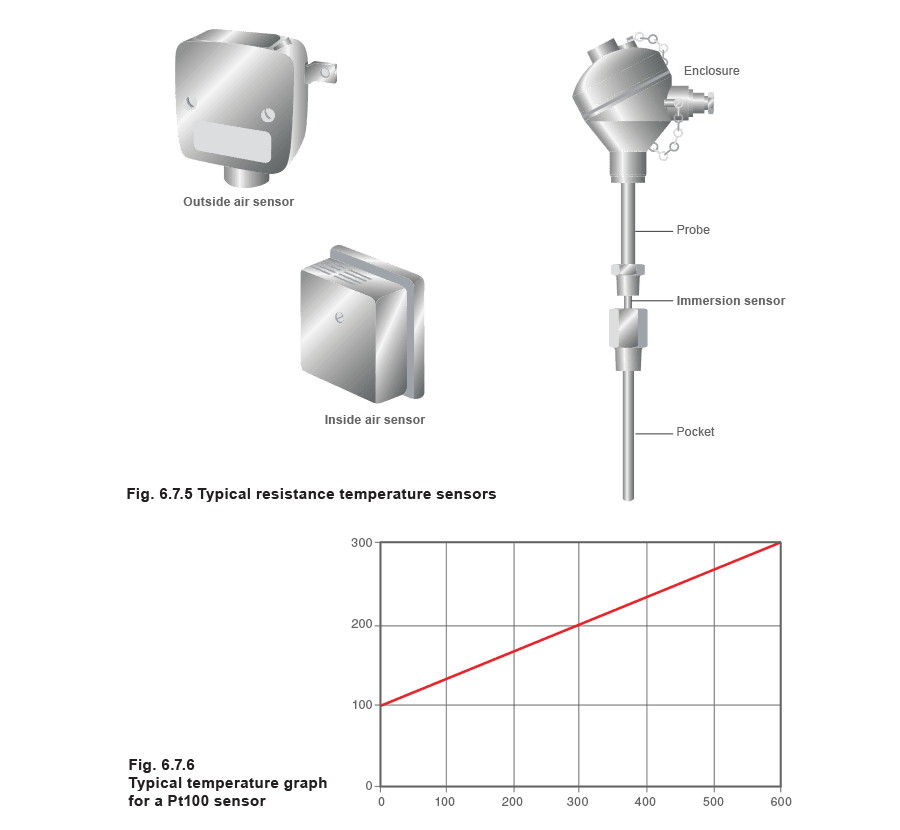 كما يمكن ملاحظة من الشكل 6.7.6، فإن زيادة المقاومة مع درجة الحرارة خطية تقريبًا. لـ Pt100 تغير نسبيًا صغير في المقاومة، مما يتطلب قياسًا دقيقًا. يجب تعويض المقاومة في كابلات التوصيل بشكل صحيح.
كما يمكن ملاحظة من الشكل 6.7.6، فإن زيادة المقاومة مع درجة الحرارة خطية تقريبًا. لـ Pt100 تغير نسبيًا صغير في المقاومة، مما يتطلب قياسًا دقيقًا. يجب تعويض المقاومة في كابلات التوصيل بشكل صحيح.
المقاومات الحرارية (ثيرميستور)
تستخدم المقاومات الحرارية مواد شبه موصلة، لها تغير كبير في المقاومة مع ارتفاع درجة الحرارة، لكنها غير خطية. تنخفض المقاومة استجابةً لارتفاع درجات الحرارة (مقاومة حرارية ذات معامل سالب)، كما هو موضح في الشكل 6.7.7.
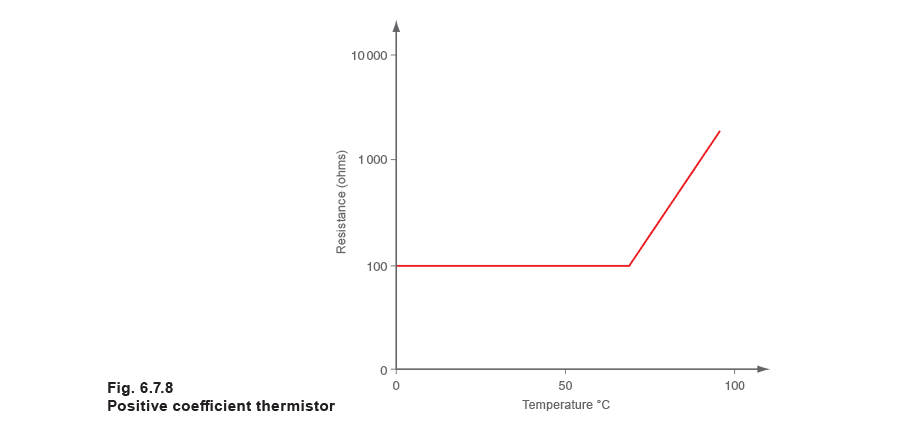
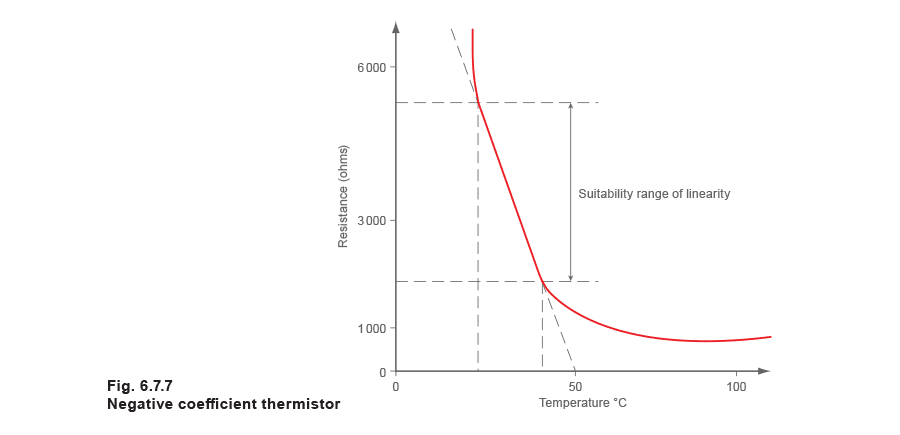 يمكن تصنيع مقاومات حرارية ذات معامل موجب حيث تزداد المقاومة مع ارتفاع درجة الحرارة (الشكل 6.7.8) لكن منحنى استجابة يجعلها غير مناسبة عمومًا لاستشعار درجة الحرارة.
المقاومات الحرارية أقل تعقيدًا وأقل تكلفة من RTDs لكنها لا تمتلك نفس الدقة العالية وقابلية التكرار. مقاومتها العالية تعني أن مقاومة كابل التوصيل أقل أهمية.
يمكن تصنيع مقاومات حرارية ذات معامل موجب حيث تزداد المقاومة مع ارتفاع درجة الحرارة (الشكل 6.7.8) لكن منحنى استجابة يجعلها غير مناسبة عمومًا لاستشعار درجة الحرارة.
المقاومات الحرارية أقل تعقيدًا وأقل تكلفة من RTDs لكنها لا تمتلك نفس الدقة العالية وقابلية التكرار. مقاومتها العالية تعني أن مقاومة كابل التوصيل أقل أهمية.
 المزدوجات الحرارية
إذا وُصِل معدنان مختلفان عند نقطتين وطُبِّقت الحرارة على نقطة الوصل (كما هو موضح في الشكل 6.7.9)، فسيتدفق تيار كهربائي حول الدائرة. تُنتج المزدوجات الحرارية جهدًا يتناسب مع فرق درجة الحرارة بين نقطة القياس (الساخنة) ونقطة المرجع (الباردة).
المزدوجات الحرارية
إذا وُصِل معدنان مختلفان عند نقطتين وطُبِّقت الحرارة على نقطة الوصل (كما هو موضح في الشكل 6.7.9)، فسيتدفق تيار كهربائي حول الدائرة. تُنتج المزدوجات الحرارية جهدًا يتناسب مع فرق درجة الحرارة بين نقطة القياس (الساخنة) ونقطة المرجع (الباردة).
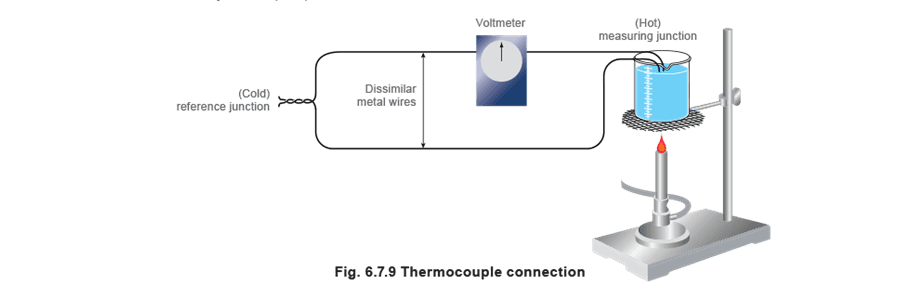 يجب أن تكون درجة حرارة نقطة المرجع الباردة معروفة بدقة إذا أراد المزدوج الحراري أن يوفر استشعارًا دقيقًا.
تقليديًا، كانت نقطة الوصل الباردة تُغمس في جليد ذائب (0 درجة مئوية)، ولكن الآن تُقاس درجة حرارة نقطة الوصل الباردة بمقاومة حرارية أو RTD، ومن هذا، تُصحَّح درجة الحرارة المُشار إليها، عمومًا عند نقطة القياس. يُعرف هذا بالتعويض لنقطة الوصل الباردة.
يجب أن تكون درجة حرارة نقطة المرجع الباردة معروفة بدقة إذا أراد المزدوج الحراري أن يوفر استشعارًا دقيقًا.
تقليديًا، كانت نقطة الوصل الباردة تُغمس في جليد ذائب (0 درجة مئوية)، ولكن الآن تُقاس درجة حرارة نقطة الوصل الباردة بمقاومة حرارية أو RTD، ومن هذا، تُصحَّح درجة الحرارة المُشار إليها، عمومًا عند نقطة القياس. يُعرف هذا بالتعويض لنقطة الوصل الباردة.
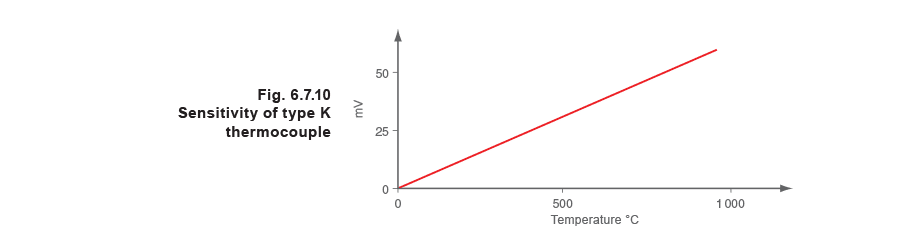
أي زوج من المعادل المختلفة يمكن استخدامه لصنع مزدوج حراري. لكن على مر السنين، تطورت عدد من الأنواع القياسية التي لها علاقة موثقة بين الجهد ودرجة الحرارة. تُشار إلى الأنواع القياسية باستخدام الحروف، أي النوع J و K و T وغيرها. أكثر مزدوج حراري استخدامًا للأغراض العامة هو النوع K.
المعادل المختلفة المستخدمة في هذا النوع هي الكروم (90% نيكل، 10% كروم) والألوميل (94% نيكل، 3% منغنيز، 2% ألومنيوم و 1% سيليكون) ويمكن استخدامها بين 0 و 1260 درجة مئوية. يوضح الشكل 6.7.10 حساسية مزدوجات النوع K، ويمكن ملاحظة أن جهد الخروج خطي عبر النطاق الكامل.
أكثر مزدوج حراري استخدامًا للأغراض العامة هو النوع K.
المعادل المختلفة المستخدمة في هذا النوع هي الكروم (90% نيكل، 10% كروم) والألوميل (94% نيكل، 3% منغنيز، 2% ألومنيوم و 1% سيليكون) ويمكن استخدامها بين 0 و 1260 درجة مئوية. يوضح الشكل 6.7.10 حساسية مزدوجات النوع K، ويمكن ملاحظة أن جهد الخروج خطي عبر النطاق الكامل.
 تُستخدم أسلاك الذيل الممتددة لتوصيل نقطة القياس بنقطة المرجع في غلاف الجهاز. قد تكون هذه الذيلات الممتددة من نفس المادة المستخدمة في أسلاك المزدوج الحراري نفسه، أو قد تكون كابل تعويض مصنوع من النحاس وسبائك النحاس-النيكل. يجب أن تكون كلا الذيلتين الممتددتين من نفس المادة.
المزدوجات الحرارية متوفرة بمجموعة متنوعة من الأحجام والأشكال. هي رخيصة ومتينة ودقيقة بشكل معقول، مع نطاقات حرارة واسعة. ومع ذلك، يجب الحفاظ على درجة حرارة نقطة المرجع عند قيمة ثابتة وإلا يجب تعويض الانحرافات. الجهود المنخفضة لنقطة الوصل تعني أنه يجب استخدام كابل مُحصّن خاص وتثبيت دقيق لمنع التداخل الكهربائي أو “الضوضاء” من تشويه الإشارات.
تُستخدم أسلاك الذيل الممتددة لتوصيل نقطة القياس بنقطة المرجع في غلاف الجهاز. قد تكون هذه الذيلات الممتددة من نفس المادة المستخدمة في أسلاك المزدوج الحراري نفسه، أو قد تكون كابل تعويض مصنوع من النحاس وسبائك النحاس-النيكل. يجب أن تكون كلا الذيلتين الممتددتين من نفس المادة.
المزدوجات الحرارية متوفرة بمجموعة متنوعة من الأحجام والأشكال. هي رخيصة ومتينة ودقيقة بشكل معقول، مع نطاقات حرارة واسعة. ومع ذلك، يجب الحفاظ على درجة حرارة نقطة المرجع عند قيمة ثابتة وإلا يجب تعويض الانحرافات. الجهود المنخفضة لنقطة الوصل تعني أنه يجب استخدام كابل مُحصّن خاص وتثبيت دقيق لمنع التداخل الكهربائي أو “الضوضاء” من تشويه الإشارات.
مثال 6.7.1 تخيل شخصين، شخص A وشخص B، كل منهما على قمة تل متقابلة ولكل منهما علم وعمود علم. الهدف هو أن يتواصل شخص A مع شخص B عن طريق رفع علمه إلى ارتفاع معين. يرفع شخص A علمه إلى منتصف عموده. يرى شخص B هذا ويرفع علمه أيضًا إلى المنتصف. عندما يُحرّك شخص A علمه لأعلى أو لأسفل، يفعل شخص B نفس الشيء للمطابقة. هذا مشابه لنظام التناظر.
مثال 6.7.2 الآن لنفترض أن شخص A ليس لديه عمود لكن لديه لوحين، أحدهما بالرقم ‘0’ والآخر بالرقم ‘1’، ويريد مرة أخرى أن يرفع شخص B علمه إلى المنتصف، أي إلى ارتفاع 50% من عمود علمه. الرقم الثنائي لـ 50 هو 110010،所以他 يعرض لوحاته، اثنين في كل مرة، بالترتيب المقابل. يقرأ شخص B هذه اللوحات، ويترجمها لتعني 50 ويرفع علمه بالضبط إلى المنتصف. هذا مشابه لنظام رقمي.
يمكن ملاحظة أن النظام الرقمي أكثر دقة لأن المعلومات إما ‘1’ أو ‘0’ ويمكن تحديد الموضع بدقة. المثال التناظري ليس دقيقًا لأن شخص B لا يستطيع تحديد ما إذا كان علم شخص A بالضبط عند 50%. قد يكون عند 49% أو 51%. لهذا السبب، جنبًا إلى جنب مع تكامل أعلى لدوائر الميكروبروسيسور، تُستخدم الإشارات الرقمية بشكل أوسع.
العنونة الرقمية تسمح العنونة الرقمية لمُنشِّئ بإرسال معلومات عبر مجموعة أسلاك متصلة بعدة أجهزة استقبال ومع ذلك يكون قادرًا على التواصل مع جهاز استقبال واحد فقط إذا لزم الأمر. يتم ذلك عن طريق تخصيص عنوان لكل جهاز استقبال، يجب على المُنشِّئ بثه أولاً.
لتوضيح هذا، ضع في اعتبارك المثال الرقمي أعلاه لكن الآن افترض أن هناك شخصًا آخر، شخص C على تل ثالث. يمكن لكل من شخص B وشخص C رؤية شخص A،所以 يجب على شخص A أولاً تحديد من يتواصل معه.
يتم ذلك باللوح الأول. إذا كان اللوح الأول ‘0’ فجميع البيانات اللاحقة مخصصة لشخص B الذي يُعدّل علمه وفقًا لذلك. بالعكس، إذا كان اللوح الأول ‘1’ فجميع البيانات اللاحقة مخصصة لشخص C. لذا فإن شخص B لديه عنوان رقمي ‘0’ وشخص C لديه عنوان رقمي ‘1’؛ كل شخص يعرف أن الرقم الأول الذي يراه يشير إلى العنوان وليس الرسالة. HART® و PROFIBUS® و Foundation™ Fieldbus.
ما هو PROFIBUS®؟ PROFIBUS® هو معيار حقل مفتوح لمجموعة واسعة من التطبيقات في أتمتة التصنيع والمعالجة مستقل عن المصنّعين. يُضمن الاستقلال عن المصنّعين والشفافية من خلال المعايير الدولية EN 50170 و EN 50254 و IEC 61158.
يسمح بالاتصال بين أجهزة مصنّعين مختلفين دون أي تعديل خاص بالواجهة. يمكن استخدام PROFIBUS® لكل من التطبيقات الحرجة زمنيًا عالية السpeed ومهام الاتصال المعقدة. يُقدم PROFIBUS® بروتوكولات اتصال مُدرَّجة وظيفيًا DP و FMS. حسب التطبيق، يمكن استخدام تقنيات الإرسال RS-485 أو IEC 1158-2 أو الألياف البصرية.
يُحدد الخصائص التقنية لنظام حقل تسلسلي® يمكن من خلاله ربط المُنشِّئات الرقمية المُوزعة القابلة للبرمجة، من مستوى الحقل إلى مستوى الخلية. PROFIBUS® هو نظام متعدد الأسياد وبالتالي يسمح بالعمل المشترك لعدة أتمتة أو هندسة أو أنظمة تصور مع مُلحقاتها المُوزعة على حافلة واحدة.
على مستوى جهاز الاستشعار/المُنشِّئ، تُنقل إشارات أجهزة الاستشعار والمُنشِّئات الثنائية عبر حافلة جهاز استشعار/مُنشِّئ. تُنقل البيانات بشكل دوري بالكامل.
على مستوى الحقل، تتواصل المُلحقات المُوزعة، مثل وحدات I/O ومحولات القياس ووحدات التشغيل والصمامات وطرفيات المشغّل مع أنظمة الأتمتة عبر نظام اتصال فعال وفوري. كما مع البيانات، يمكن أيضًا نقل التنبيهات والمعطيات وبيانات التشخيص بشكل دوري إذا لزم الأمر.
على مستوى الخلية، يمكن للمُنشِّئات القابلة للبرمجة مثل PLC و IPC التواصل مع بعضها البعض. تتطلب تدفق المعلومات حزم بيانات كبيرة وعدد كبير من وظائف الاتصال القوية، مثل التكامل السلس مع أنظمة الاتصال على مستوى الشركة، مثل الإنترنت الداخلي والإنترنت عبر TCP/IP والإيثرنت.
ما هو Foundation™ Fieldbus؟ Foundation™ Fieldbus هو نظام اتصالات رقمي بالكامل، تسلسلي، ثنائي الاتجاه يعمل كشبكة محلية (LAN) لأجهزة الأتمتة والتحكم في المصنع/المنشأة. بيئة Fieldbus® هي المجموعة الأساسية للشبكات الرقمية في تسلسل شبكات المنشآت. يُستخدم Foundation™ Fieldbus في تطبيقات أتمتة المعالجة والتصنيع ولديه قدرة مدمجة لتوزيع تطبيق التحكم عبر الشبكة.
على عكس بروتوكولات الشبكة الخاصة، لا يمتلك Foundation™ Fieldbus شركة فردية، ولا يُنظَّم من قبل دولة واحدة أو هيئة معايير. مؤسسة Foundation™ Fieldbus، منظمة غير ربحية تتألف من أكثر من 100 من أكبر موردي ومستخدمي أجهزة التحكم في العالم، تتحكم في التكنولوجيا.
بينما يحتفظ Foundation™ Fieldbus بالعديد من الميزات المرغوبة لنظام التناظر 4-20 مللي أمبير، مثل واجهة فيزيائية مُوحَّدة للسلك، وأجهزة مُغذَّاة بالحافلة على سلك واحد، وخيارات الأمان الجوهرية، فإنه يقدم أيضًا العديد من المزايا الأخرى.
قابلية تشغيل الأجهزة يقدم Foundation™ Fieldbus قابلية التشغيل البيني؛ يمكن استبدال جهاز Fieldbus® بجهاز مشابه ذات وظائف إضافية من مورد مختلف على نفس شبكة Fieldbus® مع الحفاظ على العمليات المُحددة. هذا يسمح للمستخدمين “بالمزج والمطابقة” بين الأجهزة الميدانية وأنظمة المضيف من موردين مختلفين. يمكن أيضًا للأجهزة الفردية Fieldbus® إرسال واستقبال معلومات متعددة المتغيرات، والتواصل مباشرة مع بعضها البعض عبر Fieldbus® مشترك، مما يسمح بإضافة أجهزة جديدة إلى Fieldbus® دون تعطيل الخدمات.
بيانات عملية مُحسَّنة مع Foundation™ Fieldbus، يمكن إدخال متغيرات متعددة من كل جهاز إلى نظام التحكم في المنشآت لتحليل الاتجاهات وتحسين العمليات وإنشاء تقارير. يتيح الوصول إلى بيانات دقيقة وعالية الدقة ضبط العمليات بشكل أفضل لإنتاجية أفضل وأقل وقت توقف وأداء أعلى للمنشأة.
نظرة شاملة على العملية أجهزة Fieldbus® الحديثة، ذات قدرات الاتصال القوية القائمة على الميكروبروسيسور، تسمح بالتعرف على أخطاء العملية بشكل أسرع وبيقين أكبر. כתוצאה من ذلك، يُخطر مشغلو المنشآت بالظروف غير الطبيعية أو الحاجة إلى الصيانة الوقائية، مما يسمح للموظفين باتخاذ قرارات استباقية. تُصحَّح كفاءات التشغيل المنخفضة بشكل أسرع، مما يسمح بزيادة الإنتاج مع انخفاض تكاليف المواد الخام والمشاكل التنظيمية.
تحسين سلامة المنشآت يساعد تقنية Fieldbus المنشآت الصناعية على مواكبة متطلبات السلامة الصارمة. يمكنها توفير إنذار مبكر للمشغلين حول الظروف الخطرة المحتملة، مما يسمح باتخاذ إجراءات تصحيحية لتقليل عمليات الإيقاف غير المُخطَّطة. كما توفر قدرات التشخيص المُحسَّنة للمنشآت وصولًا أقل تكرارًا إلى المناطق الخطرة، مما يُقلل من المخاطر على الموظفين.
صيانة توقعية أسهل تجعل القدرات المُحسَّنة لتشخيص الأجهزة من الممكن مراقبة وتتبع الظروف الخفية مثل تآكل الصمامات وتلوث المُرسِلين. يتمكن موظفو المنشآت من أداء الصيانة التوقعية دون انتظار إيقاف مُخطَّط، مما يُقلل أو حتى يتجنب وقت التوقف.
تقليل تكاليف الأسلاك والصيانة يوفر استخدام الأسلاك الحالية واتصالات التوصيل المتعدد توفيرًا كبيرًا في تكاليف تركيب الشبكة. يشمل ذلك تقليل حواجز الأمان الجوهرية وتكاليف الكابلات، خاصة في المناطق التي تكون الأسلاك موجودة بالفعل.
يمكن تحقيق توفير إضافي في التكاليف من خلال تقليل الوقت المطلوب للبناء وبدء التشغيل، فضلاً عن تبسيط برمجة وظائف التحكم والمنطق باستخدام كتل التحكم البرمجية المدمجة في أجهزة Fieldbus®.